개요
오랜만에 Sop Solver DOP을 쓰다보면 개념이 헷갈릴 때가 있는데,
그럴 때마다 찾아보고자 단계별로 정리하였다.
Dopnet 구조에 대한 이해
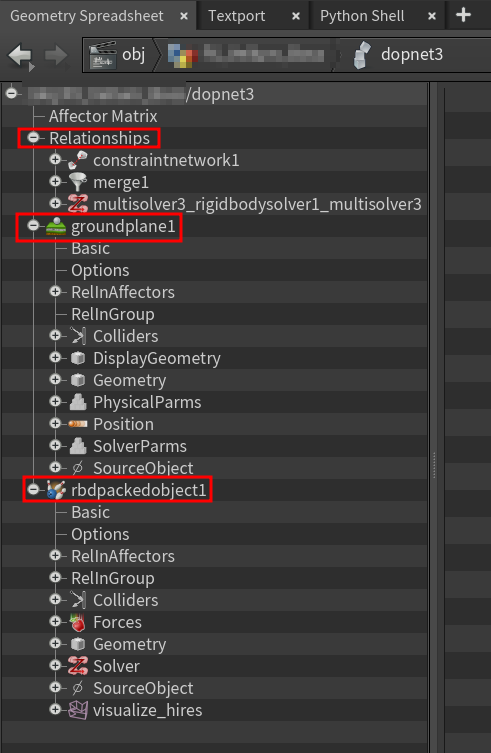
DOPnet의 지오메트리 스프레드시트 이미지를 보면,
Relationships, groundplane1, rbdpackedobject1 같은 항목들이 계층적으로 나뉘어 있습니다.
이는 Houdini의 DOPs(Dynamics Operators)가 시뮬레이션에 참여하는 객체와 그 관계를 구조적으로 관리하기 때문입니다.
각 항목이 나뉘어져 있는 이유는 다음과 같습니다.
- 객체 기반(Object-based) 구조: DOPs 시뮬레이션은 기본적으로 '객체(Object)'를 중심으로 이루어집니다. groundplane1과 rbdpackedobject1은 시뮬레이션에 참여하는 각각의 물리적 객체입니다.
- groundplane1: 시뮬레이션의 바닥 역할을 하는 정적인 객체입니다.
- rbdpackedobject1: 시뮬레이션에 참여하는 동적인 Rigid Body 객체입니다.
- 각 객체 아래에 Basic, Options, Forces, Geometry, Solver 등 여러 하위 항목이 있는 것은, 각 객체가 개별적으로 고유한 속성(Attributes), 지오메트리, 솔버 파라미터 등을 가질 수 있음을 의미합니다.
- 관계(Relationships) 관리: Relationships 항목은 시뮬레이션 객체들 간의 상호작용 및 연결을 정의합니다.
- constraintnetwork1: Vellum 또는 RBD 시뮬레이션에서 객체들 간의 제약 조건(constraint)을 관리하는 네트워크입니다. 예를 들어, 여러 객체를 핀으로 고정하거나, 특정 거리를 유지하게 하는 등의 관계를 정의합니다.
- merg1: 여러 데이터 스트림을 병합하는 역할을 합니다.
- multisolver_rigidbody_multisolver3: 여러 솔버를 결합하여 복합적인 시뮬레이션을 수행할 때 사용됩니다.
정리하자면, DOPnet은 단순히 모든 데이터를 한꺼번에 처리하는 것이 아니라, 시뮬레이션에 필요한 객체와 그 객체들 사이의 관계를 명확하게 구분하여 구조화함으로써 복잡한 시뮬레이션을 효율적으로 관리하고 제어하기 위해 이렇게 나뉘어 있습니다.
Sop Solver vs Sopnet의 차이점
SOP Solver
- 목적: 지오메트리를 시간에 따라 반복적으로(Iteratively) 변화시키는 시뮬레이션을 수행합니다.
- 작동 방식: 매 프레임마다 이전 프레임의 결과 지오메트리를 입력으로 받아, 그 위에 새로운 SOP 연산을 적용하고 다음 프레임으로 전달합니다. 지오메트리가 "점진적으로 진화"하거나 "움직임"을 가질 수 있는 이유입니다.
- 예시: 충돌이 발생할 때마다 지오메트리가 찌그러지거나, 파티클이 매 프레임마다 위치를 바꾸는 등 상태(state)를 기억하고 변화시키는 작업에 적합합니다.
DOPnet 안의 SOP Network 노드 (sopnet)
- 목적: 시뮬레이션의 특정 단계에서 일회성(One-time) 지오메트리 조작을 수행합니다.
- 작동 방식: 입력으로 들어온 지오메트리에 표준 SOP 연산을 적용하고, 그 결과를 다음 DOP 노드로 전달합니다. 이전 프레임의 결과를 기억하거나 활용하지 않습니다. 매 프레임마다 동일한 작업을 수행할 뿐입니다.
- 예시: 시뮬레이션을 시작하기 전에 특정 지오메트리를 정리하거나, 시뮬레이션 결과를 특정 형태로 패킹하는 등 상태 변화와 무관한 단순 지오메트리 편집 작업에 사용됩니다.
결론적으로, SOP Solver는 DOPnet에 SOP의 "시간을 타는 시뮬레이션" 기능을 추가하는 노드이고, SOP Network 노드는 DOPnet에 "일반적인 지오메트리 편집" 기능을 추가하는 노드라고 할 수 있습니다.
Sop solver의 연결 차이점
Houdini DOPnet에서 SOP Solver를 어디에 연결하느냐에 따라 시뮬레이션에 미치는 영향이 완전히 달라집니다. 말씀하신 두 가지 연결 방식의 차이는 시뮬레이션의 실행 순서와 목적에 있습니다.
1. Constraint Network의 'Constraint Solver'에 연결

- 목적: 시뮬레이션 객체의 "관계"나 "제약 조건(Constraints)" 자체를 시간에 따라 조작하는 것입니다.
- 의미: 이 연결은 Constraint Solver가 실행될 때 SOP Solver의 로직이 실행되도록 합니다. 이 솔버는 객체의 지오메트리나 물리적 속성(위치, 속도 등)을 다루는 것이 아니라, 객체들 사이의 연결(예: 끈, 핀, 힌지) 속성(예: 강도, 길이)을 SOP를 통해 수정할 때 사용됩니다.
- 작동 방식: Constraint Solver는 매 프레임마다 제약 조건 데이터를 가져와서 SOP Solver 내의 로직을 통해 그 값을 변경한 후, 변경된 제약 조건이 다음 시뮬레이션에 적용됩니다.
2. Rigid Body Solver의 'Post Solver'에 연결

- 목적: 메인 물리 시뮬레이션 "후에" 객체의 "지오메트리"를 조작하는 것입니다.
- 의미: Rigid Body Solver가 객체의 충돌, 중력 등 주요 물리 계산을 완료한 직후에 SOP Solver의 로직이 실행됩니다. 이 연결은 시뮬레이션의 물리적 결과(예: 충돌로 인해 위치가 변경된 객체)를 바탕으로 지오메트리를 변경하고자 할 때 사용됩니다.
- 작동 방식: Rigid Body Solver가 계산을 마친 후, 업데이트된 지오메트리 데이터를 SOP Solver로 전달합니다. 그러면 SOP Solver 내의 SOP 네트워크는 이 지오메트리에 대한 후처리(예: 충돌 지점에 찌그러짐 추가, 충격 지점 시각화)를 수행합니다.
요약
- Constraint Solver 연결: 시뮬레이션의 **"규칙(constraints)"**을 시간에 따라 변경하는 용도.
- Post Solver 연결: 시뮬레이션의 **"결과"**에 따라 지오메트리의 **"외형"**을 변경하는 용도.
이 두 연결은 모두 DOPnet에서 SOP를 사용한다는 공통점이 있지만, 적용되는 시점과 대상(데이터)이 다르므로 의도한 효과를 얻기 위해 정확히 구분해서 사용해야 합니다.
Object Merge로 불러올때, 콜론의 의미

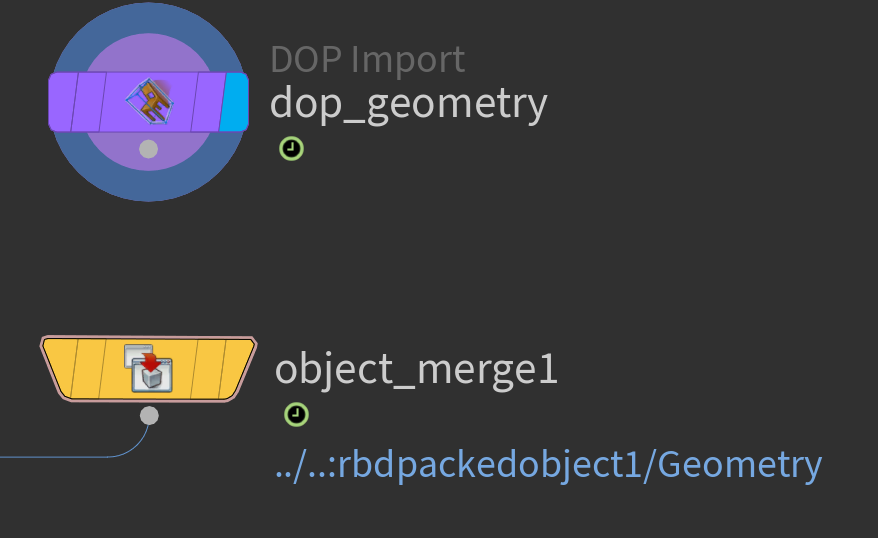
../..:rbdpackedobject1/Geometry와 같은 경로에서 콜론(:)을 사용하는 이유는 Houdini의 DOPs(Dynamics Operators)에서 **'DOP 객체'**를 참조하는 특별한 문법이기 때문입니다.
이 경로를 각 부분으로 나누어 보면 다음과 같습니다.
- ../..: 현재 노드(SOP Solver)에서 계층 구조상 두 단계 위로 올라갑니다. SOP Solver는 DOPnet 안에 있고, DOPnet은 /obj 노드 안에 있으므로, ../..는 /obj 레벨로 이동하는 것을 의미합니다.
- : (콜론): 이 콜론은 DOP 네트워크 내부의 객체(DOP Object)를 참조하는 특별한 구분자입니다. 일반적인 /는 노드 계층을 나타내지만, 콜론은 DOPnet이라는 특수한 컨테이너 안의 시뮬레이션 객체를 가리킵니다.
- rbdpackedobject1: 콜론 뒤에 오는 이 이름은 DOPnet 안에서 정의된 시뮬레이션 객체의 이름입니다.
- /Geometry: 마지막으로 / 뒤에 오는 이 이름은 해당 DOP 객체가 가지고 있는 여러 데이터 스트림 중 'Geometry'라는 이름의 데이터를 가져오겠다는 것을 명시합니다.
따라서 ../..:rbdpackedobject1/Geometry는 "현재 위치에서 두 단계 위로 올라간 후, 그 안에 있는 DOPnet에서 'rbdpackedobject1'이라는 객체의 'Geometry' 데이터를 가져오라"는 의미가 됩니다.
콜론을 사용하는 이유는 DOP 객체가 일반적인 노드 계층 구조에 속해 있지 않고 DOPnet 내부에서 동적으로 관리되기 때문에, 이를 명확하게 참조하기 위한 Houdini의 고유한 문법이라고 생각하면 됩니다.
왜 동적으로 관리하는가?
가장 단순하게 말하면 메모리와 CPU 효율성 때문이라고 할 수 있습니다.
DOP 객체를 일반적인 노드로 만들지 않고 dopnet 안에 가두어 둔 것은, 시뮬레이션에 필요한 수많은 데이터를 하나의 최적화된 블록 안에서 관리함으로써 메모리와 연산 속도를 극대화하기 위한 설계입니다. 이 덕분에 Houdini는 수십만 개의 파티클이나 수천 개의 파편과 같은 대규모 시뮬레이션을 안정적으로 처리할 수 있게 됩니다.
Houdini에서 DOP 객체가 일반적인 노드 계층 구조에 속하지 않게 만든 이유는 여러 가지가 있지만, 주로 효율성, 구조적 분리, 그리고 시뮬레이션의 동적인 특성을 고려한 설계 때문입니다.
- 구조적 분리 (Separation of Concerns):
- Houdini는 '어떤 노드가 어떤 역할을 하는가'에 대한 철학이 뚜렷합니다.
- /obj 노드 레벨은 정적이고 절차적인 지오메트리 생성 및 배치를 담당합니다.
- DOPnet은 동적이고 시간에 의존하는 시뮬레이션을 담당합니다.
- DOP 객체를 dopnet 컨테이너 안에 가둬둠으로써, 시뮬레이션의 복잡한 로직이 /obj 레벨의 깔끔한 구조를 어지럽히지 않도록 분리했습니다. 이는 사용자가 씬의 구조를 더 쉽게 이해하고 관리할 수 있게 해줍니다.
- 효율성과 성능 (Efficiency & Performance):
- 시뮬레이션은 수많은 객체와 데이터를 매 프레임, 심지어 매 서브 스텝마다 계산해야 합니다.
- 만약 모든 시뮬레이션 객체(예: 파편 1000개)가 /obj 레벨의 독립적인 노드로 존재한다면, Houdini는 매 프레임마다 그 노드들을 모두 업데이트해야 하므로 엄청난 성능 저하가 발생합니다.
- dopnet 노드는 이 모든 객체와 데이터를 하나의 최적화된 컨테이너 안에서 효율적으로 관리하고 계산합니다. 이는 특히 수천, 수만 개의 객체가 동시에 시뮬레이션되는 경우에 필수적입니다.
- 동적인 객체 생성 및 소멸:
- 시뮬레이션 중에는 객체가 생성되거나(예: 물방울), 파괴되거나(예: 폭발로 인한 파편화), 병합될 수 있습니다.
- /obj 레벨에서 노드를 동적으로 생성하고 소멸시키는 것은 매우 복잡하고 비효율적인 작업입니다.
- dopnet은 이 모든 동적인 변화를 자신의 내부에서 빠르고 효과적으로 처리할 수 있도록 설계되었습니다.
요약하자면, DOP 객체를 dopnet 안에 가두어 둔 것은 시뮬레이션의 독특한 데이터 처리 방식과 성능 요구 사항을 최적으로 만족시키기 위한 Houdini의 핵심적인 설계 결정이라고 볼 수 있습니다.
DOP Import와 Object Merge의 차이


결론은 단순히 지오메트리를 불러오는 결과만 본다면 동일할 수 있지만, 두 노드의 목적과 기능은 동일하지 않습니다.
DOP Import 노드는 DOPnet의 데이터를 SOPnet으로 가져오는 데 특화된 공식적인 도구이며, Object Merge는 일반적인 지오메트리를 참조하는 범용적인 도구입니다.
두 노드의 차이점
| 특징 | DOP Import 노드 | Object Merge 노드 |
| 목적 | DOPnet의 시뮬레이션 데이터를 SOPnet으로 가져오는 전용 도구입니다. | 씬의 모든 지오메트리 데이터를 참조하는 범용 도구입니다. |
| 유연성 | DOP Network와 Objects 필드를 통해 동적으로 DOPnet 경로를 설정할 수 있고, 지오메트리 데이터 외에 Transform 데이터도 함께 불러올 수 있는 등 시뮬레이션 데이터 가져오기에 특화된 기능이 많습니다. | DOP 데이터를 가져오려면 ../..:rbdpackedobject1/Geometry와 같은 수동 경로를 직접 입력해야 합니다. |
| 변환 처리 | Transform Geometry 옵션을 통해 시뮬레이션에 따라 변환된 객체의 위치, 회전 등을 정확하게 적용할 수 있습니다. | 이 기능이 없기 때문에, DOP 객체의 변환 정보를 직접 가져와 적용하는 것이 복잡할 수 있습니다. |
| 안정성 | 시뮬레이션 데이터 흐름에 맞춰 설계되었기 때문에, 데이터 가져오기 과정에서 발생하는 문제를 최소화합니다. 권장되는 방법입니다. | dop 문법을 사용해 데이터를 가져오긴 하지만, 전용 도구가 아니기 때문에 복잡한 시뮬레이션에서는 예상치 못한 동작을 할 수 있습니다. |
요약
DOP Import 노드는 시뮬레이션 데이터를 가져오기 위해 특별히 제작된 전용 도구입니다. 제공해주신 이미지처럼, DOP Import는 단순히 지오메트리 데이터뿐만 아니라 변환 정보까지 정확하게 가져오고, 동적으로 네트워크 경로를 지정하는 등 시뮬레이션 워크플로우에 최적화된 기능을 제공합니다.
반면 Object Merge는 일반적인 용도로 사용되지만, DOP 객체를 참조하는 특별한 문법을 알면 유사한 결과를 얻을 수도 있습니다. 하지만 복잡한 시뮬레이션에서는 DOP Import 노드가 훨씬 안정적이고 유연하므로, DOP 데이터를 SOP로 가져올 때는 DOP Import 노드를 사용하는 것이 올바른 워크플로우입니다.
'이펙트 (FX) > 이펙트 팁 : Houdini' 카테고리의 다른 글
| [Houdini] 뷰포트 Secure Selection 기능 장단점 (연속 선택, 연속 편집시 필수) (0) | 2025.08.15 |
|---|---|
| [Houdini/RBD] Deforming 오브젝트의 Constraint 업데이트 오류 해결법 (Destruction) (0) | 2025.08.15 |
| [Houdini/RBD] 파괴 조각내기 마스터클래스 소개 (Fracturing, Voxyde) (0) | 2025.08.13 |
| [Houdini/RBD] 파괴 워크플로우 공식 학습법 소개 (Destruction, hip 첨부) (0) | 2025.08.13 |
| [Houdini] Houdini x ComfyUI 통합 연구 소개 (0) | 2025.08.11 |




댓글